New algorithm makes quadrocopters safer
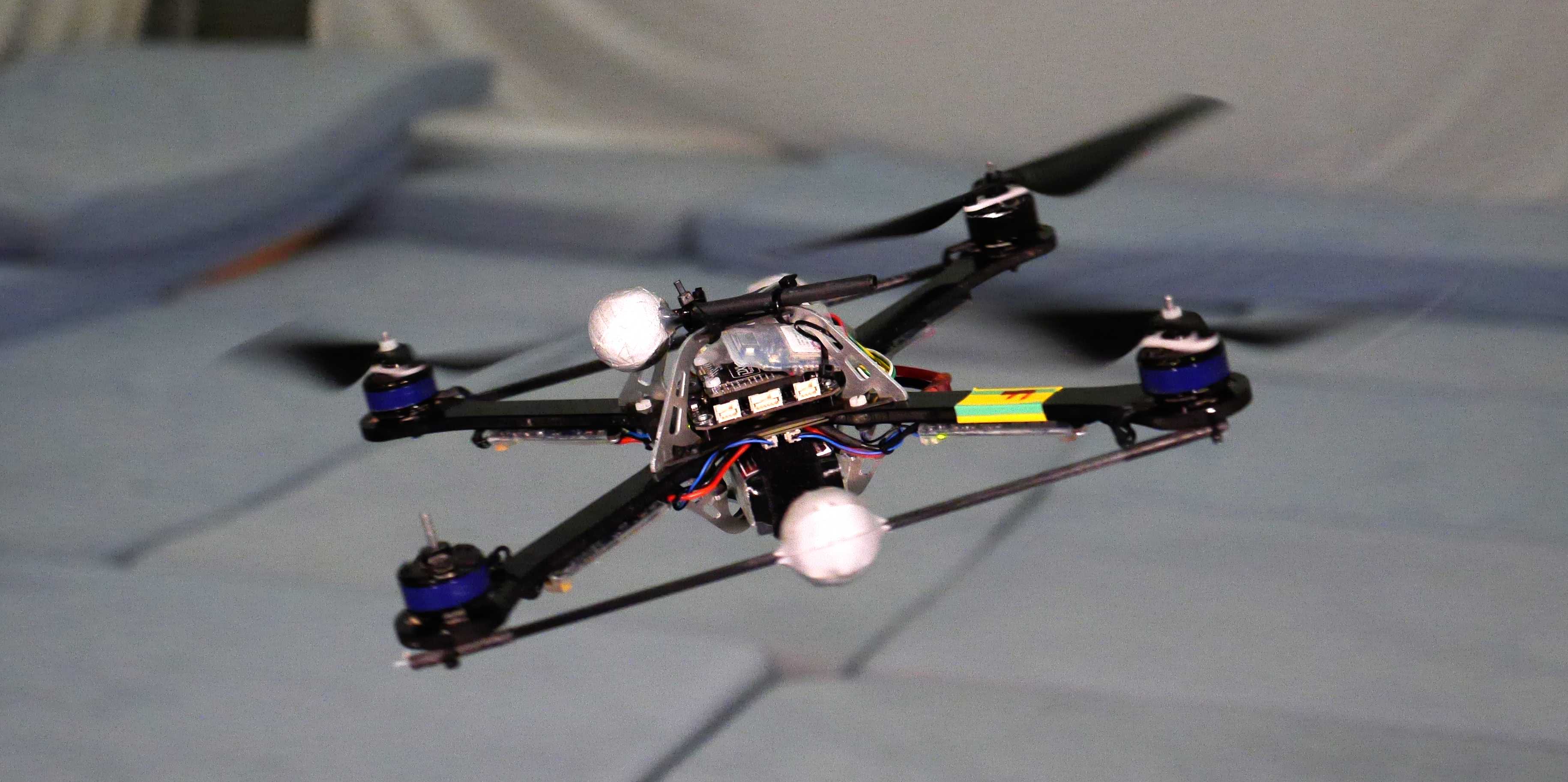
Researchers at ETH Zurich have developed a novel control algorithm that allows quadrocopters to continue to fly in spite of multiple motor or propeller failures. This algorithm makes these vehicles safer and may allow them to be used for instance in delivery services.
Drones like quadrocopters have become very popular with hobbyists due to their simplicity and agility. But they are also increasingly being used for commercial applications such as aerial photography and cinematography, inspection and transportation of cargo. Only a few days ago, Amazon announced plans for a new Prime Air service using drones to deliver small packages. Since then the US package delivery company UPS has announced similar plans.
One of the primary concerns currently limiting the widespread use of quadrocopters is safety. At the moment regulations severely restrict the commercial use of drones in most countries, including the EU and the US. However, regulators including the Federal Aviation Administration in the US are presently drafting suitable rules for civil unmanned aircraft systems potentially allowing drone delivery services like Amazon's Prime Air to become commercially viable as soon as 2015. When Jeff Bezos, CEO of Amazon.com, recently presented their research in using flying machines for package delivery, he pointed out one of the major concerns: "Look, this thing can’t land on somebody’s head while they’re walking around their neighborhood".
If a quadrocopter loses a propeller, it can no longer control its flight with the normal control software, and may crash in a public area. ETH researchers have now developed a failsafe technology that makes quadrocopters safer and may thus pave the way for these vehicles to be used in safety-critical applications.
Safety is the key to future operations
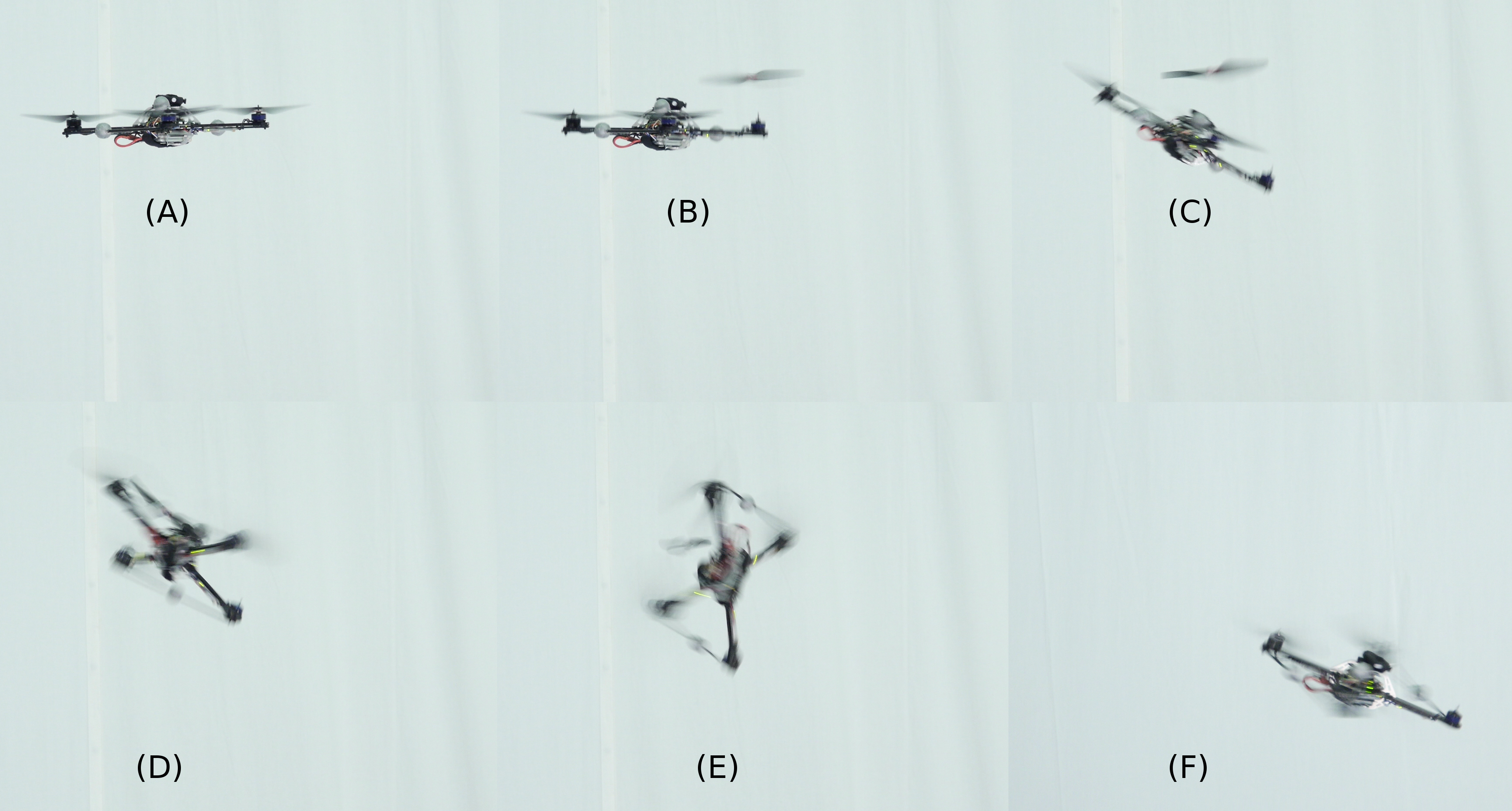
"When our new software detects a propeller failure, it uses the remaining propellers to cause a continuous rotation of the vehicle,” explains Mark Mueller, doctorate student at the Institute of Dynamic Systems and Control of ETH Zurich. The failsafe algorithm then controls the vehicle's movement by tilting this rotation, and varying the total produced thrust of the remaining propellers.
Until now, designers have had to use more than four propellers (for instance six propellers for a hexacopter, and eight for an octocopter) to allow the vehicles to survive the loss of a propeller. But hexa- and octocopters tend to be less efficient than quadrocopters, because each additional propeller adds structural weight, complexity, and increases the probability of a single motor failing.
Easy retrofit for multicopters
"Our failsafe technology requires no additional hardware, it's a software-only upgrade. This means that it could be easily implemented on existing multicopters." says Mueller. "The software allows multicopters to remain airborne and perform a controlled emergency landing with as little as three, two, or even just one motor intact."
The technology builds on, and extends, previous results from the Flying Machine Arena - a research testbed at ETH Zurich. Here, the researchers continuously work on developing new capabilities for flying machines, with a specific focus on quadrocopters.
