The adaptive robot
ETH researchers have developed a robot that can ascertain the temperature and elasticity of objects – and adapt independently to various ranges in the process.
“We have a vision of robots that can cope with unknown objects and environments and even repair themselves independently as the case may be,” explains Fumiya Iida, Professor of Bio-Inspired Robotics at the Institute of Robotics and Intelligent Systems. Unlike today’s robots that can generally carry out only specific tasks, intelligent machines of this kind would be able to tackle complex challenges – for example, a mission to Mars or clean-up campaigns in places such as Fukushima.
In order to react to the unexpected, machines also have to actively observe their environment and be able to adapt to it. Iida’s group showed proof of principle that this is indeed possible in its publication that recently appeared in PLoS One. It presents a robot that can examine the temperature and elasticity of unknown objects with tools that it manufactures autonomously on-site and in variable designs.
Measuring instrument built from hot glue
The robot developed by the researchers essentially works with a camera, a mathematical algorithm and an integrated 3D printer that uses hot glue, like that used by hobbyists and DIYers. The printer and camera are secured to a metal encasing that can move like a head in any direction with the help of a robotic arm.
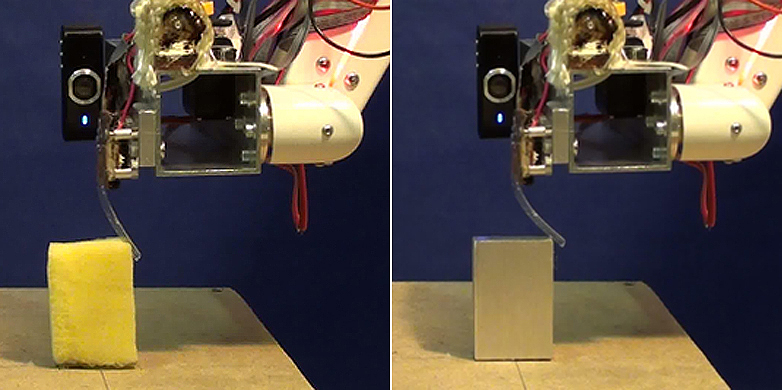
In order to investigate the elasticity of an unknown object, the robot produces rods of various thicknesses from hot glue. It picks up the finished rods and presses them against the object to be examined. The camera takes pictures of the curvature of the rod. The software evaluates the images and determines the elasticity of the object.
Precision in diverse ranges
Initially, the measuring method seems quite complicated and not very practical, and to date the robot does not deliver exact values. But the principle is extremely clever: as the robot uses rods of varying thickness – in principle, instruments of varying sensitivity – and as a result is able to adapt to various objects individually, it can measure the elasticity of a sponge just as easily as that of an aluminium block. The problem of standard measuring tools – that precise measurements and a large range are not possible at the same time – does not present a hurdle for the robot.
Just as flexibly as it determines elasticity, the robot can also measure the temperature of various objects. It produces cylindrical hot glue lumps as an additional tool, affixes them on to its contact surface and holds it against the object, so that the temperature of the contact zone can conform to that of the object. The properties of the hot glue change above a certain temperature: if it becomes fluid at the contact point, the hot glue lump drops and the software detects the temperature of the object based on when this occurs. The robot can also refine the measurements by varying the size of the cylinder and contact point.
Nature as a model for machines
No concrete application for this robot exists beyond the scope of research. But Iida’s group had another aim: to show that in principle it is possible and feasible to build ‘intelligent’ machines that actively examine their environment and can adapt their sensors independently.
Following this success, the research team intends to advance with other senses, such as hearing, seeing and touching, and develop adaptive sensors for these. Nature has always served the researchers as a model: “We try to learn from nature and to improve our machines with its ideas,” explains Iida. “The sensory organs of humans and animals have also changed their form and functioning in the course of their evolution. And our eyes and ears, for example, can actively adapt to various ranges.”
It will be some time before the adaptive sensors match the natural sensory organs and can be used in real, unpredictable situations. In unknown territory, humans and animals are far superior to machines.
Reference
Nurzaman SG, Culha U, Brodbeck L, Wang L, Iida F: Active Sensing System with In Situ Adjustable Sensor Morphology. PLoS ONE, 1 December 2013, 8(12): e84090. doi:external page10.1371/journal.pone.0084090